
联系我们
-
联系人:米娜
手 机:18988785989
电 话:18988785989
传 真:0755-29063839
邮 箱:taibang@tbbetter.com
地 址:深圳市宝安区福永街道桥头社区宝安大道6301伟丰大厦911室

扫一扫,保存联系方式
三菱Q172DSCPU在定位设备中的应用
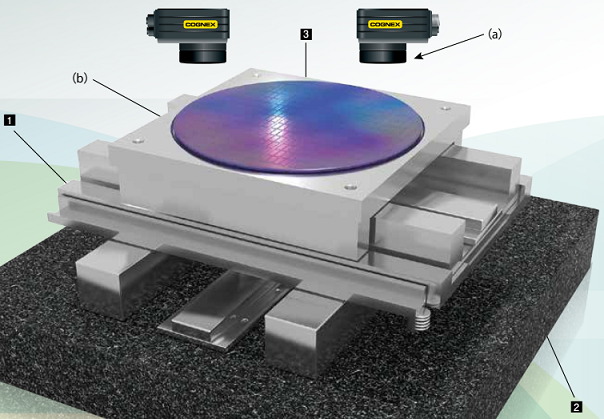
1 X轴 2 Y轴 3 θ轴
(a) COGNEX公司产视觉系统 (b) 晶片
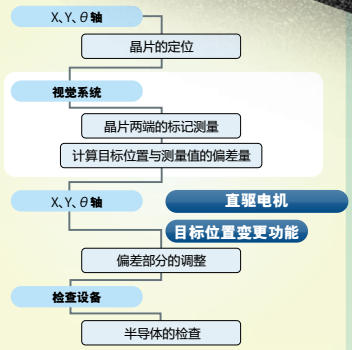
动作流程
现场课题
课题01正确定位晶片—-解决课题:COGNEX公司生产的视觉系统:。
课题02高精确度定位旋转轴—-解决课题:直驱电机。
课题03缩短节拍时间—-解决课题:目标位置变更功能。
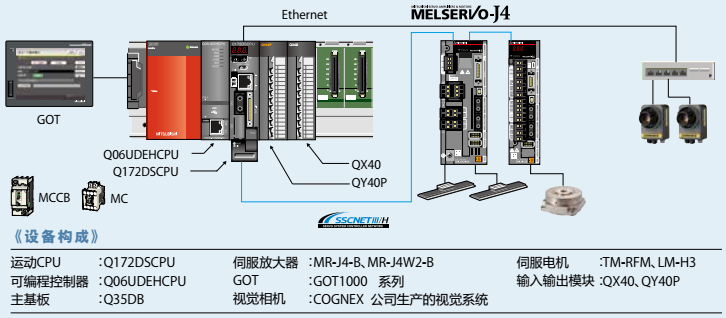
模型系统
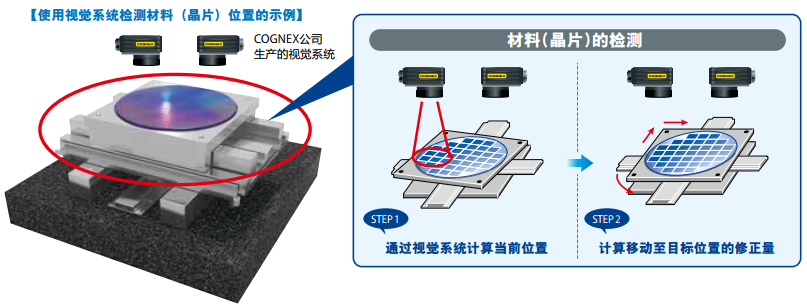
解决现场课题
解决01视觉系统:快速检测出晶片的当前位置!
通过视觉系统可轻松读出晶片的当前位置,调整目标位置,可快速移动。
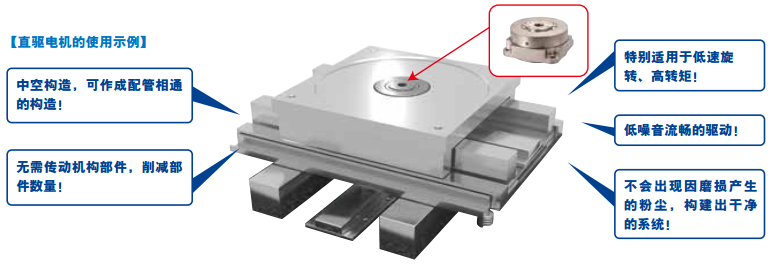
解决02直驱电机:直接与驱动部分连接,实现“高响应、高精确度”!
通过在旋转轴使用直驱电机,实现高响应、高精确度的稳定的定位。
最适用于低速旋转、高转矩。
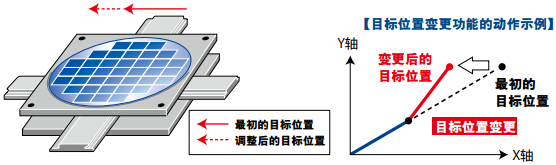
解决03目标位置变更功能:定位中可变更目标位置,缩短节拍时间!
定位中根据视觉系统的位置数据修正位置时,无需重新系统定位即可移动目标位置,缩短了节拍时间。
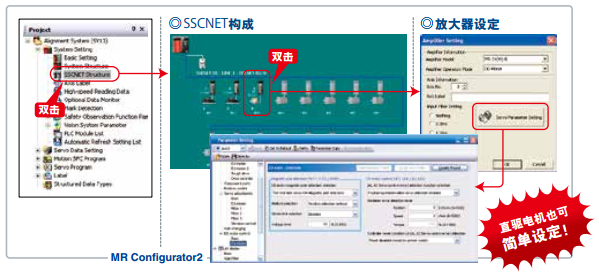
启动步骤
步骤1:系统构成的设定
进行伺服放大器的设定。
步骤2:Ethernet连接参数的设定
设定运动控制器的IP地址。

步骤3:视觉系统连接的设定
设定视觉系统的Ethernet通信、视觉程序动作相关的参数。

步骤4:运动SFC程序的生成
仅通过记录简单的视觉系统专用命令,即可读取视觉系统中的位置数据。

该《应用案例》适用于检查前·后的图像处理系统、太阳能电池板的生产设备、FPD 生产设备、3D LCD 生产设备、SEMI 逻辑检查设备等。









 业务经理:米小姐
业务经理:米小姐
